Indice dei contenuti
Integrali doppi e tripli
Il cambio di variabile negli integrali multipli
Sia $ \phi $ una trasformazione invertibile:
$ \mathbf{u}=\phi \left( \mathbf{v} \right)=\begin{pmatrix} \phi_1\left( \mathbf{v} \right) \\ \vdots \\ \phi_n\left( \mathbf{v} \right) \end{pmatrix} $
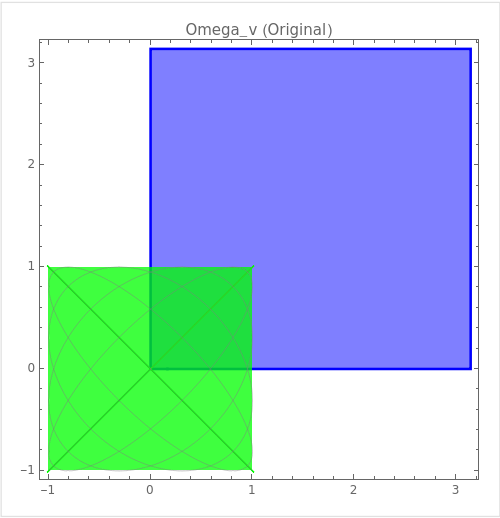
Il dominio di integrazione di partenza ${{\Omega }_{v}}$ verrà mappato nel nuovo dominio di integrazione ${{\Omega }_{u}}$. Dove ogni punto ${{\mathbf{u}}_{0}}$ del secondo dominio si trova in corrispondenza di un punto ${{\mathbf{v}}_{0}}$ del primo dominio, e i due punti sono legati fra loro dalla relazione ${{\mathbf{u}}_{0}}=\phi \left( {{\mathbf{v}}_{0}} \right)$.
Nel fare il cambio di variabili bisogna tener conto che ci sarà una deformazione dello spazio, e se ne può tenere conto attraverso il determinante della matrice Jacobiana.
$\int\limits_{{{\Omega }_{\mathbf{u}}}}{f( \mathbf{u} )\,d{{u}_{1}}d{{u}_{2}}\cdots d{{u}_{n}}} = \int\limits_{{{\Omega }_{\mathbf{v}}}}{f( \phi ( \mathbf{v} ) )\,|\det \mathbf{J}|\,\,d{{v}_{1}}d{{v}_{2}}\cdots d{{v}_{n}}}$
Matrice Jacobiana (cambi di coordinate per integrali doppi e tripli)
La matrice Jacobiana, denominata così in onore del matematico Carl Gustav Jacob Jacobi, è un concetto fondamentale nell’analisi matematica, in particolare nello studio delle funzioni di più variabili. La matrice Jacobiana di una funzione fornisce un’importante rappresentazione lineare dell’approssimazione di prima derivata di tale funzione vicino a un punto specifico. Questa rappresentazione è cruciale per comprendere il comportamento locale delle funzioni di più variabili e gioca un ruolo chiave in diversi campi come l’ottimizzazione, la teoria del controllo, e l’analisi numerica.
Definizione:
Data una funzione vettoriale $ \mathbf{f} : \mathbb{R}^n \rightarrow \mathbb{R}^m $, definita da $ m $ funzioni di $ n $ variabili reali, cioè:
$ \mathbf{f}(\mathbf{x}) = \begin{pmatrix} f_1(x_1, x_2, …, x_n) \\ f_2(x_1, x_2, …, x_n) \\ \vdots \\ f_m(x_1, x_2, …, x_n) \end{pmatrix}, $
dove $ \mathbf{x} = (x_1, x_2, …, x_n) $ è il vettore delle variabili indipendenti, la matrice Jacobiana $ \mathbf{J}_{\mathbf{f}}(\mathbf{x}) $ di $ \mathbf{f} $ in $ \mathbf{x} $ è la matrice $ m \times n $ delle prime derivate parziali delle funzioni componenti di $ \mathbf{f} $, così definita:
$ \mathbf{J}_{\mathbf{f}}(\mathbf{x}) = \begin{pmatrix} \frac{\partial f_1}{\partial x_1} & \frac{\partial f_1}{\partial x_2} & \cdots & \frac{\partial f_1}{\partial x_n} \\ \frac{\partial f_2}{\partial x_1} & \frac{\partial f_2}{\partial x_2} & \cdots & \frac{\partial f_2}{\partial x_n} \\ \vdots & \vdots & \ddots & \vdots \\ \frac{\partial f_m}{\partial x_1} & \frac{\partial f_m}{\partial x_2} & \cdots & \frac{\partial f_m}{\partial x_n} \end{pmatrix}. $
Ogni elemento $ \frac{\partial f_i}{\partial x_j} $ della matrice Jacobiana rappresenta la derivata parziale della $ i $-esima funzione componente rispetto alla $ j $-esima variabile indipendente, valutata in $ \mathbf{x} $.
Significato:
La matrice Jacobiana generalizza il concetto di derivata a funzioni vettoriali di più variabili. Nel caso in cui $ m = n $ e la matrice Jacobiana sia quadrata, il suo determinante, noto come determinante Jacobiano, fornisce informazioni importanti sulle trasformazioni coordinate e sulle proprietà di invertibilità locale della funzione $ \mathbf{f} $.
In generale, però è difficile inventare cambi di coordinate in più variabili, e questo è legato al fatto che è difficile inventare delle funzioni di mappaggio tra due vettori di coordinate suriettive. Quindi nella pratica ad eccezione delle trasformazioni lineari non si calcola esplicitamente il determinante della matrice Jacobiana, ma ci si affida a cambi di coordinate noti che vedremo nei paragrafi successivi e per cui il calcolo della matrice Jacobiana viene fatto solo in teoria, sotto forma di dimostrazione e poi semplicemente si applica quello noto nello svolgimento degli esercizi.
Teorema di Fubini-Tonelli per il calcolo di integrali doppi
Il teorema di Fubini-Tonelli, quando applicato a integrali doppi su una regione $ K $ che è normale rispetto agli assi $ x $ o $ y $, fornisce un metodo semplificato per calcolare l’integrale di una funzione $ f(x, y) $ su $ K $. Prima di descrivere la semplificazione, definiamo cosa significa che un insieme $ K $ sia normale rispetto a un asse:
- Insieme normale rispetto all’asse $ x $: Un insieme $ K $ nel piano $ xy $ è detto normale rispetto all’asse $ x $ se per ogni $ x $ in un intervallo $[a, b]$, $ K $ include tutti i punti $(x, y)$ dove $y$ varia tra due funzioni $ g_1(x) $ e $ g_2(x) $, che sono i limiti inferiori e superiori di $ K $ in $ y $ per quell’ $ x $.
- Insieme normale rispetto all’asse $ y $: , $ K $ è normale rispetto all’asse $ y $ se per ogni $ y $ in un intervallo $[c, d]$, $ K $ include tutti i punti $(x, y)$ dove $x$ varia tra due funzioni $ h_1(y) $ e $ h_2(y) $, che sono i limiti di $ K $ in $ x $ per quella $ y $.
Quando $ K $ è normale rispetto a un asse, il teorema di Fubini-Tonelli permette di calcolare l’integrale di $ f(x, y) $ come un’integrazione iterata, semplificando il calcolo di integrali doppi complicati. Ecco come:
1. Per insiemi normali rispetto all’asse $ x $:
$ \iint_{K} f(x,y) \, dx dy = \int_{a}^{b} \left( \int_{g_1(x)}^{g_2(x)} f(x,y) \, dy \right) dx $
2. Per insiemi normali rispetto all’asse $ y $:
$ \iint_{K} f(x,y) \, dx dy = \int_{c}^{d} \left( \int_{h_1(y)}^{h_2(y)} f(x,y) \, dx \right) dy $
Questa semplificazione è potente perché riduce il problema del calcolo di un integrale doppio su una regione complessa a due problemi di calcolo di integrali singoli, che sono spesso più semplici da risolvere. La chiave sta nell’essere in grado di descrivere la regione di integrazione $ K $ in termini di funzioni che limitano $ K $ normalmente rispetto all’asse di integrazione. Questo approccio rende più gestibile il calcolo di aree, volumi, o altre quantità fisiche descritte da integrali doppi in situazioni in cui la geometria di $ K $ si adatta bene a questa descrizione.
Esempio di applicazione del teorema di Fubini-Tonelli per il calcolo di un integrale doppio
Facciamo un esempio semplice calcolando l’area di una regione $K$ che sia normale rispetto all’asse $y$, usando il teorema di Fubini-Tonelli. Prendiamo la funzione $ f(x, y) = 1 $ su una regione $K$ delimitata dalle curve $y = x^2$ e $y = 4$.
L’obiettivo è calcolare l’area di $K$, che corrisponde all’integrale doppio di $f(x, y) = 1$ su $K$:
$ A = \iint_{K} 1 \,dxdy $
Passo 1: Determinare i limiti di integrazione.
La regione $K$ è normale rispetto all’asse $y$, quindi possiamo esprimere $x$ in termini di $y$. Le curve si intersecano quando $x^2 = 4$, quindi $x = -2$ e $x = 2$. Questo ci dà un intervallo in $y$ da $0$ a $4$ (dal basso dell’iperbole al top del rettangolo). Per $x$, i limiti vanno dalla curva inferiore alla superiore per ogni $y$ fissato, ovvero da $\sqrt{y}$ a $-\sqrt{y}$ (dato che stiamo considerando l’area alla sinistra dell’asse $y$).
Passo 2: Applicare il teorema di Fubini-Tonelli per calcolare l’integrale.
$ A = \int_{0}^{4} \int_{-\sqrt{y}}^{\sqrt{y}} 1 \,dx dy $
Passo 3: Calcolare l’integrale interno in $dx$.
$ \int_{-\sqrt{y}}^{\sqrt{y}} 1 \,dx = \sqrt{y} – (-\sqrt{y}) = 2\sqrt{y} $
Passo 4: Calcolare l’integrale esterno in $dy$.
$ A = \int_{0}^{4} 2\sqrt{y} \, dy = \left. \frac{4}{3}y^{3/2} \right|_{0}^{4} = \frac{4}{3}(4^{3/2}) – \frac{4}{3}(0^{3/2}) = \frac{4}{3} \cdot 8 = \frac{32}{3} $
Quindi, l’area della regione $K$ delimitata dalle curve $y = x^2$ e $y = 4$ è $\frac{32}{3}$ unità quadrate. Questo esempio mostra come il teorema di Fubini-Tonelli semplifica il calcolo di integrali doppi decomponendoli in integrali iterati più semplici.
I cambi di coordinate noti nello spazio bidimensionale (integrali doppi)
Passaggio in coordinate polari:
$ \begin{pmatrix} x \\ y \\ \end{pmatrix} = \begin{pmatrix} \rho \cos \theta \\ \rho \sin \theta \\ \end{pmatrix} $
Nel caso delle coordinate polari si ha $|\det \mathbf{J}|=\rho $
Dimostrazione per il calcolo del determinante della matrice Jacobiana
La relazione data
$ \begin{pmatrix} x \\ y \\ \end{pmatrix} = \begin{pmatrix} \rho \cos \theta \\ \rho \sin \theta \\ \end{pmatrix} $
rappresenta la trasformazione dalle coordinate polari $(\rho, \theta)$ alle coordinate cartesiane $(x, y)$. Per dimostrare che il modulo del determinante della matrice Jacobiana $|\det \mathbf{J}|$ è uguale a $\rho$, dobbiamo prima trovare la matrice Jacobiana della trasformazione.
La matrice Jacobiana $\mathbf{J}$ di una trasformazione da coordinate polari a cartesiane è data dalle derivate parziali delle funzioni di trasformazione rispetto a ciascuna delle variabili di origine, nel nostro caso $\rho$ e $\theta$. Quindi, abbiamo:
$ \mathbf{J} = \begin{pmatrix} \frac{\partial x}{\partial \rho} & \frac{\partial x}{\partial \theta} \\ \frac{\partial y}{\partial \rho} & \frac{\partial y}{\partial \theta} \\ \end{pmatrix} $
Sostituendo $x = \rho \cos \theta$ e $y = \rho \sin \theta$, otteniamo le derivate parziali:
$ \mathbf{J} = \begin{pmatrix} \cos \theta & -\rho \sin \theta \\ \sin \theta & \rho \cos \theta \\ \end{pmatrix} $
Il determinante di $\mathbf{J}$ è quindi calcolato come:
$ \det \mathbf{J} = (\cos \theta)(\rho \cos \theta) – (-\rho \sin \theta)(\sin \theta) = \rho(\cos^2 \theta + \sin^2 \theta) $
Sapendo che $\cos^2 \theta + \sin^2 \theta = 1$, si ha:
$ \det \mathbf{J} = \rho(1) = \rho $
Quindi, il modulo del determinante della matrice Jacobiana $\mathbf{J}$, che rappresenta il fattore di scala dell’area (o del volume, in dimensioni superiori) quando si passa da coordinate polari a cartesiane, è esattamente $\rho$. Questo dimostra che $|\det \mathbf{J}| = \rho$.
Passaggio in coordinate ellittiche:
$ \begin{pmatrix} x \\ y \\ \end{pmatrix} = \begin{pmatrix} a \rho \cos \theta \\ b \rho \sin \theta \\ \end{pmatrix} $ Nel caso delle coordinate ellittiche si ha $|\det \mathbf{J}|=ab\rho $
$a$ e $b$ danno una misura degli assi dell’ellissi, che può essere pensata come una deformazione dello spazio, che tende a schiacciare una circonferenza, secondo il rapporto assiale $\frac{a}{b}$
I cambi di coordinate noti nello spazio tridimensionale (integrali tripli)
Passaggio in coordinate cilindriche:
Ecco la rappresentazione delle coordinate cartesiane $(x, y, z)$ in coordinate cilindriche $(\rho, \theta, z)$:
$ \begin{pmatrix} x \\ y \\ z \\ \end{pmatrix} = \begin{pmatrix} \rho \cos \theta \\ \rho \sin \theta \\ z \\ \end{pmatrix} $
Questa rappresentazione mostra come le coordinate cartesiane $x$ e $y$ sono convertite in coordinate polari $(\rho, \theta)$, mentre la coordinata $z$ rimane invariata.
Per le coordinate cilindriche che si ha $|\det \mathbf{J}|=\rho $
Passaggio in coordinate sferiche:
Ecco la rappresentazione delle coordinate cartesiane $(x, y, z)$ in coordinate sferiche $(\rho, \theta, \phi)$:
$ \begin{pmatrix} x \\ y \\ z \\ \end{pmatrix} = \begin{pmatrix} \rho \cos \theta \sin \phi \\ \rho \sin \theta \sin \phi \\ \rho \cos \phi \\ \end{pmatrix} $
Questa rappresentazione mostra come le coordinate cartesiane $x$, $y$, e $z$ sono convertite in coordinate sferiche $(\rho, \theta, \phi)$.
Per le coordinate sferiche bisogna tenere conto che il determinante della matrice Jacobiana è dato da $|\det \mathbf{J}|={{\rho }^{2}}\sin \phi $
$\theta \in \left[ 0,2\pi \right]$ $\phi \in \left[ 0,\pi \right]$ ${{x}^{2}}+{{y}^{2}}+{{z}^{2}}={{\rho }^{2}}$ , ${{x}^{2}}+{{y}^{2}}={{\rho }^{2}}{{\sin }^{2}}\phi $
Alcuni esercizi svolti sugli integrali tripli per il calcolo di volumi
Formule per il calcolo dei baricentri in due dimensioni
Il baricentro di una superficie è dato dal punto $P=(x_A,x_B)$. Nota che il baricentro di superfici bidimensionali corrisponde esattamente a quello calcolato in ambito fisico, con l’ipotesi che la superficie sia omogenea, cioè composta da un unico materiale. Altrimenti l’integrale andrebbe pesato per la densità di superficie che varia in base al tipo e alla composizione del materiale.
${{x}_{A}}=\frac{\int\limits_{S}{x\,dS}}{\int\limits_{S}{\,dS}}\,,\,\,\,{{y}_{A}}=\frac{\int\limits_{S}{y\,dS}}{\int\limits_{S}{\,dS}}\,,$
Alcuni esercizi svolti sul calcolo di baricentri
Formule per il calcolo dei baricentri in tre dimensioni
Nel caso tridimensionale, il baricentro (o centroide) di un volume solido viene calcolato in modo simile a quello di una superficie bidimensionale, ma estendendo la nozione alle tre dimensioni spaziali. In presenza di un solido omogeneo, dove la densità $\rho$ è costante (o non viene considerata variabile), le coordinate del baricentro $P=(x_G, y_G, z_G)$ si ottengono integrando le coordinate $x$, $y$, e $z$ su tutto il volume $V$ del solido, e dividendo ciascuna di queste per il volume totale $V$.
Le coordinate del baricentro $P$ per un solido omogeneo sono date da:
$ x_G = \frac{\int\limits_{V}{x\,dV}}{\int\limits_{V}{dV}}\,, $
$ y_G = \frac{\int\limits_{V}{y\,dV}}{\int\limits_{V}{dV}}\,, $
$ z_G = \frac{\int\limits_{V}{z\,dV}}{\int\limits_{V}{dV}}\,, $
dove $dV$ rappresenta un elemento infinitesimale di volume all’interno del solido, e gli integrali sono calcolati su tutto il volume $V$ del solido.
Il denominatore rappresenta il volume del solido.
Caso con Densità Variabile:
Quando il solido non è omogeneo e la sua densità $\rho(x, y, z)$ varia in funzione della posizione, è necessario considerare la densità di volume nella formula del baricentro. In questo caso, le coordinate del baricentro sono date da:
$ x_G = \frac{\int\limits_{V}{x\rho(x, y, z)\,dV}}{\int\limits_{V}{\rho(x, y, z)\,dV}}\,, $
$ y_G = \frac{\int\limits_{V}{y\rho(x, y, z)\,dV}}{\int\limits_{V}{\rho(x, y, z)\,dV}}\,, $
$ z_G = \frac{\int\limits_{V}{z\rho(x, y, z)\,dV}}{\int\limits_{V}{\rho(x, y, z)\,dV}}\,, $
dove $\rho(x, y, z)$ è la densità di volume del materiale in ciascun punto del solido. Questa formulazione tiene conto della distribuzione variabile della massa all’interno del volume, assicurando che regioni di maggiore densità abbiano un maggiore impatto nel calcolo della posizione del baricentro.
Nel caso in cui si tiene conto della densità di massa, il denominatore assume il significato fisico di massa del solido.
In entrambi i casi, il calcolo del baricentro tramite integrali richiede la conoscenza della forma geometrica del solido e, nel caso di densità variabile, della sua distribuzione di massa. Questi calcoli trovano applicazione in vari campi dell’ingegneria e della fisica, come nella determinazione del centro di massa di strutture o oggetti complessi, dove il baricentro gioca un ruolo chiave nell’analisi della stabilità e del comportamento dinamico.
Teoremi di Guldino (Solidi e superfici di rotazione)
I teoremi di Guldino, permettono di calcolare superfici laterali e volumi di solidi di rotazione ottenuti facendo ruotare di un angolo $\alpha$ una curva o una superficie che giace su un piano, intorno ad un asse che giace sullo stesso piano. In particolare Guldino, grazie ai suoi teoremi è riuscito a mettere in relazione l’area della superficie e la lunghezza della curva, con volume e superficie laterale del solido attraverso il baricentro e la distanza di esso dall’asse di rotazione.
1. L’area della superficie ottenuta ruotando una curva piana $\gamma $ di un angolo $\alpha \in \left[ 0,2\pi \right]$ attorno ad un asse di rotazione ad esso esterno e complanare è pari :
$A=d\cdot \alpha \cdot l\left( \lambda \right)$
Dove d è la distanza del baricentro dall’asse di rotazione e $l\left( \lambda \right)$ è la lunghezza della curva.
2. Il volume di un solido di rotazione $\Omega $ ottenuto ruotando una figura piana $K$ di un angolo $\alpha \in \left[ 0,2\pi \right]$ attorno ad un asse di rotazione ad essa esterna e complanare (che giace sullo stesso piano) è pari a:
$V=d\cdot \alpha \cdot A\left( K \right)$
Dove d è la distanza del baricentro dall’asse di rotazione e $A\left( K \right)$è l’area della superficie.
Teoremi di Guldino semplificati per il caso di rotazione intorno agli assi cartesiani
I teoremi di Guldino stabiliscono un metodo per calcolare le superfici laterali e i volumi dei solidi di rotazione generati facendo ruotare una curva o una superficie piana intorno a un asse cartesiano, che giace nello stesso piano della curva o della superficie. Questi teoremi collegano l’area della superficie e la lunghezza della curva con il volume e la superficie laterale del solido attraverso il baricentro e la sua distanza dall’asse di rotazione.
1a. Per la Rotazione attorno all’asse x (calcolo di area)
L’area della superficie $ A $ generata dalla rotazione di una curva piana $ \gamma $ attorno all’asse x per un angolo $ \alpha \in [0, 2\pi] $ è data da:
$ A = 2\pi y \cdot l(\gamma) $
dove $ y $ è la distanza del baricentro della curva dall’asse x e $ l(\gamma) $ è la lunghezza della curva. La formula diventa:
$ A = 2\pi \int_{\gamma} y \, dl $
1b. Per la Rotazione attorno all’asse y (calcolo di area)
L’area della superficie $ A $ generata dalla rotazione di una curva piana $ \gamma $ attorno all’asse y per un angolo $ \alpha \in [0, 2\pi] $ è data da:
$ A = 2\pi x \cdot l(\gamma) $
dove $ x $ è la distanza del baricentro della curva dall’asse y e $ l(\gamma) $ è la lunghezza della curva. La formula diventa:
$ A = 2\pi \int_{\gamma} x \, dl $
2a. Per la Rotazione attorno all’asse x (calcolo di volume)
Il volume $ V $ del solido di rotazione $ \Omega $ ottenuto facendo ruotare una figura piana $ K $ attorno all’asse x per un angolo $ \alpha \in [0, 2\pi] $ è dato da:
$ V = 2\pi y \cdot A(K) $
dove $ y $ è la distanza del baricentro della figura piana dall’asse x e $ A(K) $ è l’area della figura. Pertanto, la formula si esprime come:
$ V = 2\pi \iint_{K} y \, dS $

2b. Per la Rotazione attorno all’asse y (calcolo di volume)
Il volume $ V $ del solido di rotazione $ \Omega $ ottenuto facendo ruotare una figura piana $ K $ attorno all’asse y per un angolo $ \alpha \in [0, 2\pi] $ è dato da:
$ V = 2\pi x \cdot A(K) $
dove $ x $ è la distanza del baricentro della figura piana dall’asse y e $ A(K) $ è l’area della figura. Pertanto, la formula si esprime come:
$ V = 2\pi \iint_{K} x \, dS $
Alcuni esercizi svolti sul teorema di Guldino
Lezioni di Analisi Matematica 2